We are hardware-agnostic and support robots, sensors, cameras, and motion-capture systems across the robotics ecosystem. Standardized data collection for AI training at scale.
Hardware Categories
Modular, scalable hardware solutions for robotics data collection
Category 1
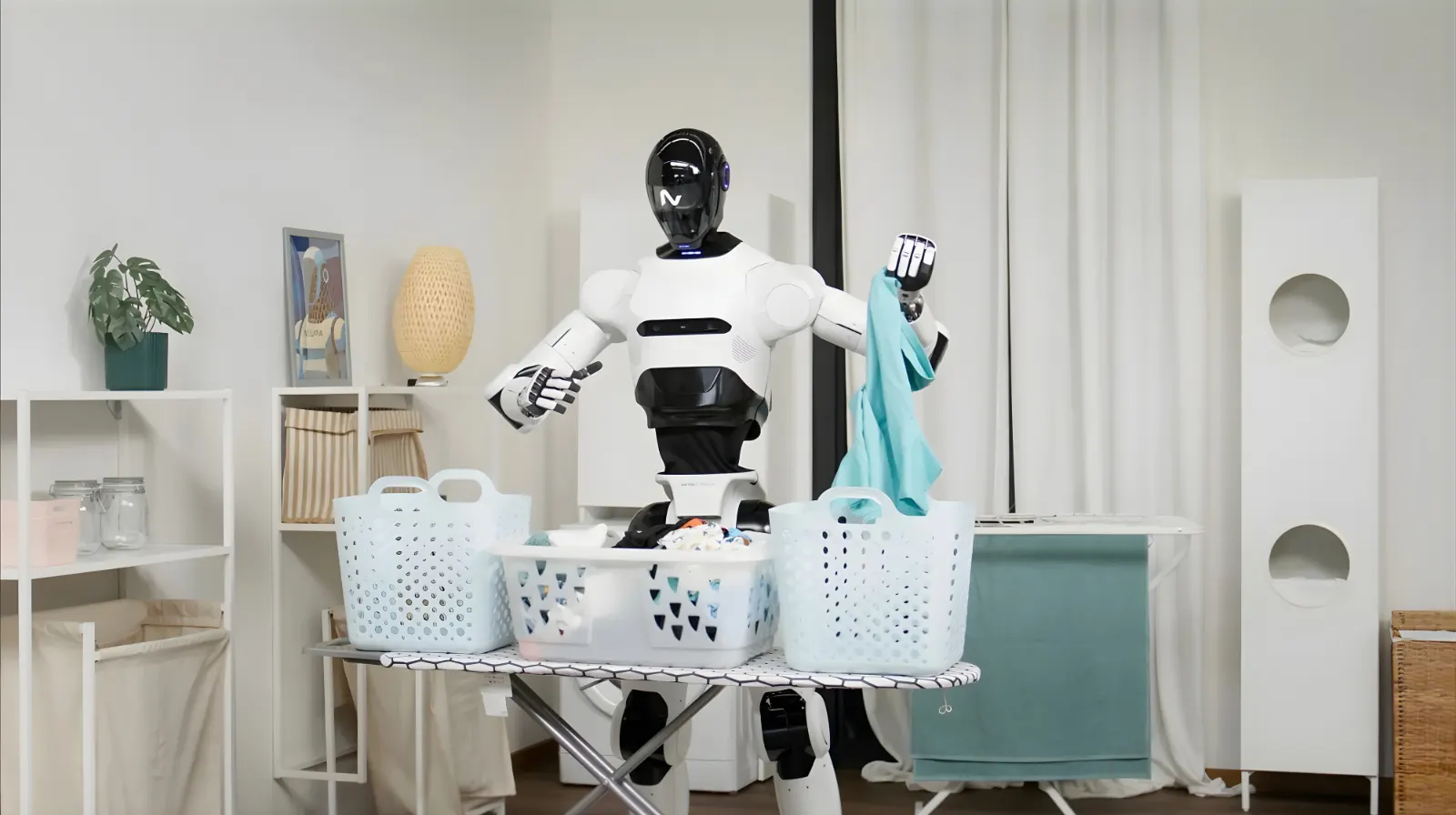
Humanoid Robots
Full-body and upper-torso humanoid systems for complex manipulation tasks
Our approach standardizes datasets across platforms while respecting your existing hardware investments
Standardized Datasets
We standardize datasets across different hardware platforms, ensuring consistency and interoperability for AI model training.
Use Your Existing Hardware
No need to replace your current robotics infrastructure. Our system works with the hardware you already own and operate.
Focus on Data Quality
We focus on data quality, synchronization, and calibration—not hardware lock-in. Your data works everywhere.
Data Types in Physical AI
Comprehensive multi-sensor datasets capturing every dimension of human skill for robotics training
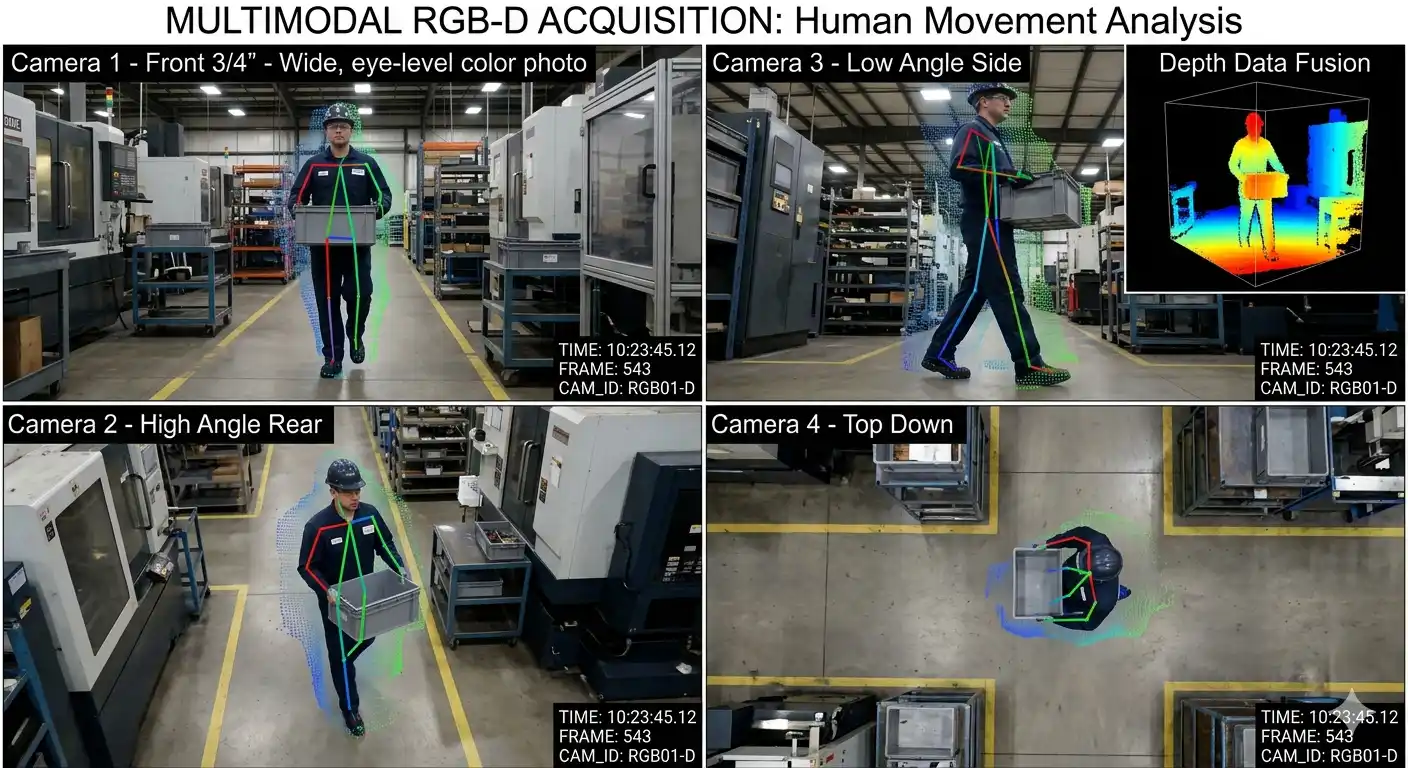
Vision Data
Multi-camera RGB and depth recordings capturing human movements from multiple angles.
4K RGB video at 30-60 FPS
Depth maps from RealSense/Kinect
Synchronized multi-view recordings
Calibrated camera intrinsics
Undistorted image sequences
Motion Capture Data
Precise skeletal tracking with joint angles, velocities, and accelerations.
22+ joint skeleton tracking
Hand pose with finger tracking
Body orientation & rotation
Joint velocities & accelerations
Marker-based or markerless capture
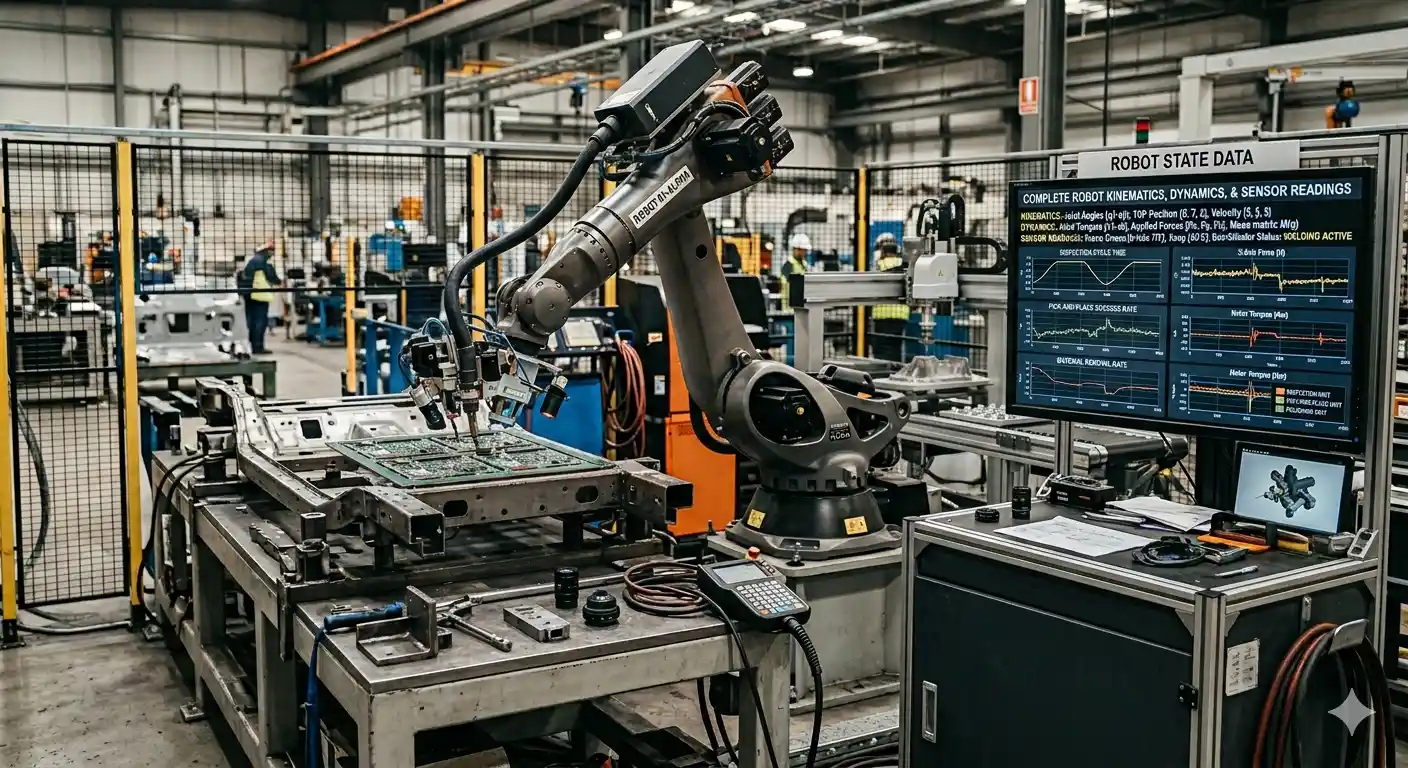
Robot State Data
Complete robot kinematics, dynamics, and sensor readings during task execution.
Joint angles (DOF positions)
Joint velocities & torques
Gripper force & position
End-effector pose (6D)
Sensor feedback streams
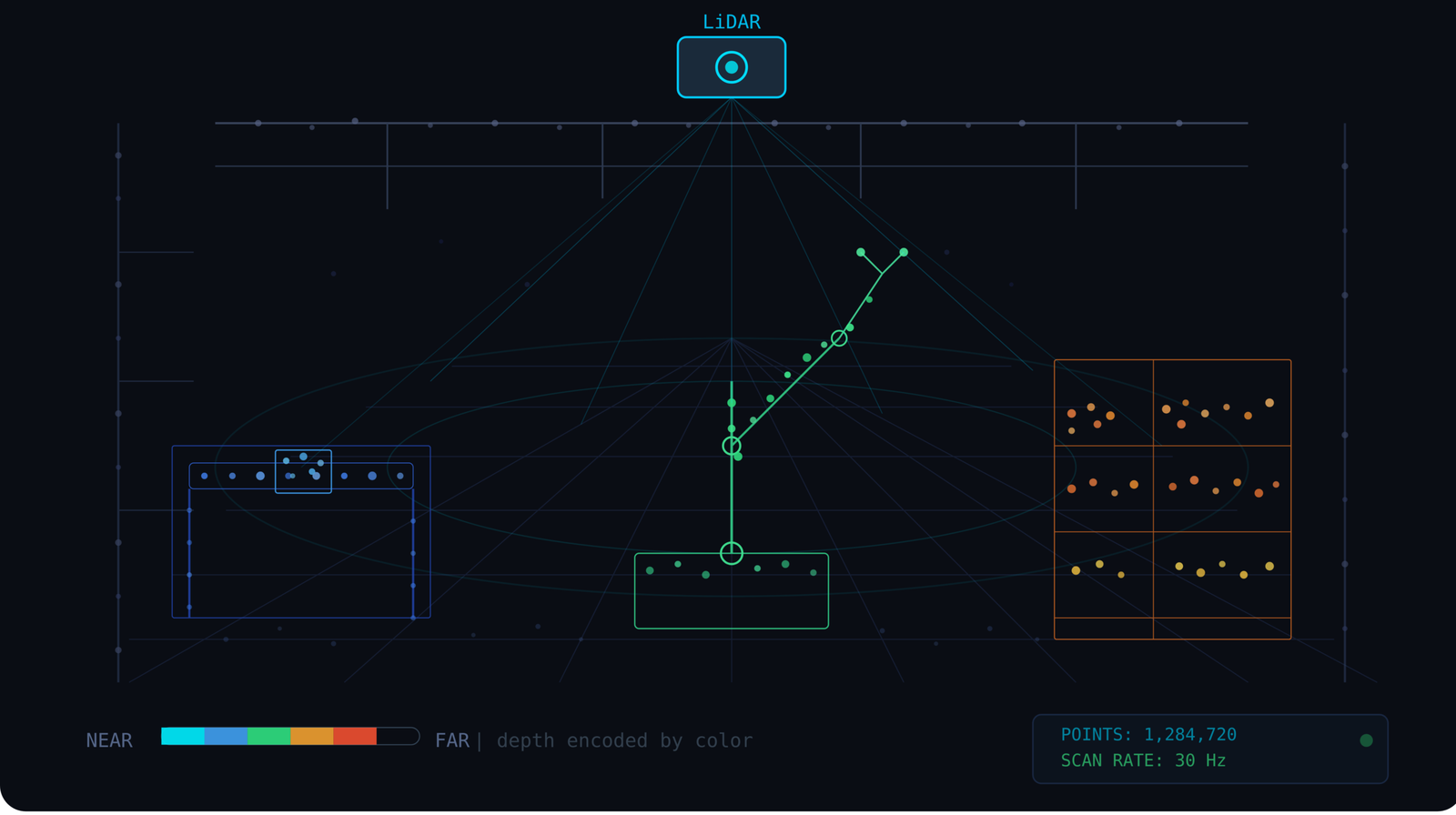
3D Point Cloud & LiDAR
Spatial scene understanding with depth information and environmental context.
XYZ point clouds at 30 FPS
LiDAR scans with intensity
Voxel grid representations
Semantic segmentation masks
Scene reconstruction data
Context & Audio Data
Environmental context, audio cues, and metadata for comprehensive understanding.
Stereo audio recordings
Environmental sounds
Task-specific metadata
Lighting conditions
Temperature & humidity logs
Multi-Sensor Synchronization
All sensors work in perfect harmony, capturing every detail of human skill with microsecond precision.
Timestamp Synchronization
All sensors synchronized to microsecond precision
Hardware Sync
Trigger-based synchronization across multiple devices
Software Sync
Post-processing alignment for non-synchronized sources
Calibration
Camera intrinsics, extrinsics, and IMU calibration
Format Standardization
Unified data format across all sensor types
Quality Validation
Automated checks for sync drift and data integrity
±1ms
Sync Precision
8+
Simultaneous Sensors
100%
Data Integrity
Data Format & Structure
Standardized formats for easy integration with your training pipelines.
Output Formats
HDF5 (efficient storage)
COCO JSON (detection)
MP4 video sequences
Point cloud (PLY, PCD)
Rosbag (ROS format)
Parquet (analytics)
Metadata Included
Timestamps (all sensors)
Camera calibration data
Environmental conditions
Task annotations
Quality metrics
Provenance tracking
Our Vision
We are building India’s largest standardized robot-data capture ecosystem across labs, factories, and homes. By connecting diverse hardware platforms through standardized data protocols, we enable AI researchers and roboticists to access high-quality, synchronized datasets that accelerate the development of intelligent physical systems.
Get production-ready datasets for robotics and AI synchronized, calibrated, and delivered in your preferred format. Start building smarter automation systems today.